
We are all alone, born alone, die alone, and—in spite of True Romance magazines—we shall all someday look back on our lives and see that, in spite of our company, we were alone the whole way. I do not say lonely—at least, not all the time—but essentially, and finally, alone. This is what makes your self-respect so important, and I don’t see how you can respect yourself if you must look in the hearts and minds of others for your happiness.
—Hunter S. Thompson, The Proud Highway: Saga of a Desperate Southern Gentleman, 1955-1967
Month: December 2019
Calculating Measurement Accuracy
When you’re evaluating a measurement device for an application, the first rule of thumb is that the device’s accuracy must be 10x better than your maximum tolerance (tolerance being the total allowable error). So if your target accuracy is +- 50µm (100µm), your measurement device should have an accuracy of 10µm or better.
Two terms commonly used interchangeable are accuracy and precision. This image illustrates the difference:

Accuracy is the ability to measure true values. It is a function of a devices resolution, linearity error, and temperature error.
Precision (also used interchangeably with repeatability) is the ability to perform consistent measurements. You can use offset’s to achieve accuracy if the device is highly repeatable.
To calculate a devices accuracy, there are three specifications to first consider:
- Resolution: the smallest measurement change the device can detect. Typically this is a function of the CMOS sensor pixel density and optics. If you think about a CMOS like a ladder, the spacing between each rung is its resolution. Light will fall in one rung or the other, and you can’t get better than that.
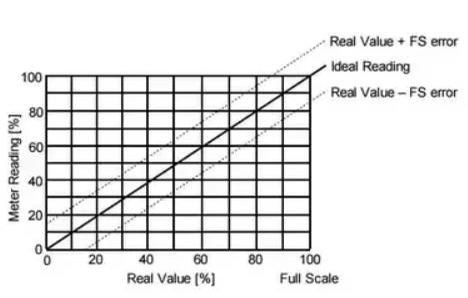
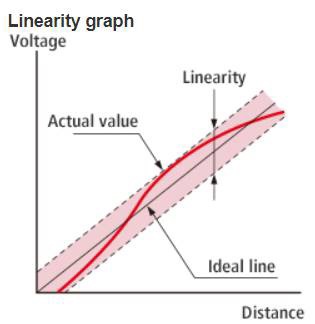
- Linearity (% F.S.): The consistency of measurements over the entire measurement window range. Linearity is a function of the electronics signal processing. It’s typically presented as a % error of the Full Scale of its measurement range. You can minimize out this error by decreasing the measurement range. You can also use a calibration function to adjust for linearity.
- Temperature characteristics (% F.S./ᵒC):Represents the maximum measurement error value that occurs when the temperature of the sensor head changes one degree. This is a function of the expansion and contraction of components within the device, such as optics, CMOS, etc.
% of F.S. (full scale) refers to the entire measurement range of the device. If a device has a +-5mm measurement range, it’s full scale is 10mm. The Linearity or Temperature error is a function of the range that’s being measured.
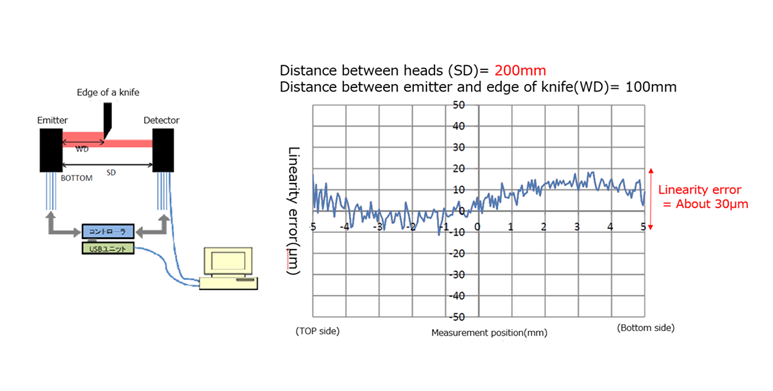
This is an example of the linearity effect demonstrated on a micrometer:
To calculate accuracy, you will add the following:
Resolution + Linearity error + Temperature error = Accuracy
If a measurement device application has the following specifications:
Measurement Range: +-5mm (10mm)
Resolution: 10 micron
Linearity: 0.1 % F.S.
Temperature characteristics: 0.01 % F.S./ᵒC
Ambient Operating Temperature Range: 20ᵒC to 30ᵒC (10ᵒC variation)
You can calculate accuracy:
(10µm resolution) + (0.001 linearity error * 10mm measurement range) + (0.0001 temperature characteristics * 10mm measurement range * 10ᵒC variation)=
10 µm + 0.01 µm + 0.01 µm = 10.02 µm
The final common consideration to calculate the controls system accuracy is your analog signal noise. If you’re sending measurement data digitally via serial or TCP, there won’t be any analog signal noise, but your controls response time will be slower since the signal is converted digitally before its sent out.
The fastest way to capture measurement data is analog signals: Voltage (-10 to 10V, 0 to 5V, 1 to 5V) or Current (4 to 20mA) outputs. The longer your cable from the device to your controller, the more electrical noise you introduce. The shorter the cable, the less noise.
Calculating this noise error ratio is beyond my expertise, but I do know that Current output is the preferred analog signal for eliminating noise error. However, I believe Current is also a slower response time, since the sensor voltage signal is converted to current in the device, sent to the controller, and converted back into voltage to be processed.
Most of these response time delays will be minimal, and for most applications, not worth the consideration.
I hope this was helpful!
Plane
My soul weeps. The hallow interior echos. White paint flakes on the window sill. I pick nervously and press my nose against the cool window. My small breath clouds the panes. Dark leafy vegetation sprouts beneath. Rain drops fall like meteors. The leaves tremor with every splash. My eyes beam cross the thick lawn, deep into the penetrating forest. Waiting.
I turn and slide down the wall. My laces are in knots. The raw wood floor is bare and nicked all over, with dust and lint hiding in the crevices.
Floral designs repeat on the wavering paper walls, peeling at the edges. I fixate on an vertical schism, observing a mismatch in patterns. Flowering buds split and bulge and warp because of some careless application of wall paper.
My thumb massages the warm buckeye, while my pointer fingers the hole in my pocket.
“Welcome to flight 6749 to San Francisco. Please buckle you seatbelt as we’re preparing to taxi for takeoff. “
“We apologize for the mechanical delays. We’ll make sure to make up for the lost time in the air.”
I cock my head. An obese Native American man with enlarged earlobes and long obsidian hair stares out the small window. Various native jewelry ornament his neck and wrists.
I close my eyes and breath a sigh.
A howling screech and large crash jolt me from sleep. I sit up, with headphones still playing Ludovico Einaudi’s aural dreams. There is visible panic throughout the cabin. I can’t make out what the pilots announce on the intercom, but I somehow don’t seem to mind. Agitation ripples through the rows. A bright yellow light flashes from the right side of the plane, and I close my eyes. There is a roll and a pitch, followed by a sudden feeling of weightlessness. The cabin lights are on, but my eyes are still closed, still being serenaded by the piano music.
My body is thrown violently back and forth, as if caught in the jaws of a vicious animal, flailing in every direction.
Blackness leads to silence and then coldness, and finally wetness. I can hear a crackling echo above and all around me, but I don’t move. I want to dream.
I push my limp body up off the icy ground and find myself in a dark forest, which looks like it’s been shredded with a wood chipper. Glints of flickering light cast shadows all around me. I walked to the fuselage, stepping over soft dark masses blotting the snow. Perhaps soil, perhaps clothing, perhaps something darker. As my eyes peak around the fuselage, I see the inside, with the top cleaved off like a sardine can, and rows of bodies strapped to their seats. There is no movement among the twisted wreckage. Lifeless limp bodies. Only a handful of small fires burn. There is a noxious scent of fumes in the air.
There is no moon, and the full brunt of Arctic like temperatures began to seize my body.
I climb to the top a wing laying against a thicket of felled trees to see above the tops of the tree line. Snow capped mountains extend into endless receding rows as far as my eyes can see.
I am all alone.
Write This Way
“Write books only if you are going to say in them the things you would never dare confide to anyone.” —Emil Cioran
